
Experiência com Kirigami – A capacidade de agarrar, segurar e manipular objetos é uma operação vital e fundamental em sistemas biológicos e de engenharia.
Aqui, apresentamos uma pinça macia que utiliza um sistema de material simples que permite uma preensão precisa e rápida, podendo ser miniaturizada, modularizada e acionada remotamente.
Esta pinça macia é baseada em conchas de kirigami – conchas finas e elásticas estampadas com uma variedade de cortes.
O padrão de corte do kirigami é determinado pela avaliação da mecânica e geometria da casca, usando uma combinação de experimentos, simulações de elementos finitos e modelagem teórica, o que permite que o design da pinça seja escalável e independente do material.
Demonstramos que a pinça de concha kirigami pode ser facilmente integrada a uma plataforma robótica existente ou acionada remotamente usando um campo magnético.
O padrão de corte kirigami resulta em uma célula unitária simples que pode ser conectada em série e novamente em paralelo, para criar matrizes de pinças kirigami capazes de agarrar simultaneamente vários objetos delicados e escorregadios.
Essas garras macias e leves terão aplicações em robótica, sensação ao toque e design de dispositivos biomédicos.
Introdução à experiência com Kirigami
Experiência com Kirigami – Agarrar e manipular objetos é uma parte essencial da vida diária tanto para humanos quanto para robôs.
Os humanos podem realizar apreensão e manipulação precisas com base na morfologia da mão, e a morfologia da mão inspirou uma variedade de designs de garras robóticas, desde garras rígidas baseadas em ligação até pinças macias.
Embora a mecânica e a cinemática da preensão robótica tenham sido extensivamente investigadas, a preensão em ambientes não estruturados e o manuseio de objetos escorregadios, deformáveis e frágeis, mesmo quando assistidos por efetores finais adaptativos ou visão computacional e aprendizagem, ainda são grandes desafios no fronteira da apreensão e manipulação robótica.
Os efetores finais compatíveis são uma tecnologia emergente para interações homem-máquina e são altamente desejados em aplicações biomédicas, embalagens de alimentos e reabilitação.
A conformidade, ou suavidade, permite que a garra agarre objetos desconhecidos e objetos que estejam em ambientes não estruturados. As inovações no design de pinças macias incluem novas formas de design, como garras baseadas em tentáculos ou dedos, mãos macias antropomórficas com dedos e palma e uma pinça universal.
Dependendo de sua configuração deformada, essas pinças podem realizar preensão poderosa envolvendo um objeto com múltiplos pontos de contato, preensão precisa apertando um objeto com um ponto de contato por dedo, ou ambos.
Envolver objetos através de uma preensão suave foi realizado usando a atuação pneumática e hidráulica de elastômeros macios e arquitetados. A dependência da atuação de fluidos é limitante, porque requer suporte externo amarrado, pode ser difícil de adaptação a diferentes ambientes e os limites físicos da litografia suave restringem a miniaturização.
A exigência de um sistema de suporte adicional amarrado e os desafios com a miniaturização também ocorrem na atuação acionada por cabo. Alternativamente, garras macias podem ser acionadas pela deformação de materiais responsivos a estímulos, que podem se deformar em resposta à luz, temperatura, elétrica, magnética e química estímulos.
Esses materiais podem abrir caminho para uma apreensão livre e em múltiplas escalas; no entanto, os materiais que respondem a estímulos muitas vezes sacrificam a velocidade e a precisão da resposta.
A suavidade, amplamente definida, é uma função tanto do material quanto da geometria. A complacência extremamente elevada de estruturas delgadas – independentemente do seu módulo de elasticidade – permite-lhes dobrar-se e conformar-se a várias formas, tornando-as candidatas ideais para agarrar.
Mecanismos compatíveis permitem que várias estratégias de projeto forneçam movimentos de transformação e agarramento de forma, obtendo movimento cinemático a partir da deformação finita de componentes estruturais.
Através da flexão de membros flexíveis ou elementos rígidos conectados com dobradiças flexíveis, movimentos complexos podem ser alcançados a partir de projetos topológicos simples, como mecanismos de transformação de forma inspirados em origami.
Em geral, embora a transmissão de força das garras macias seja limitada em comparação com as garras robóticas rígidas, a sua complacência aumenta a adaptabilidade das garras, permitindo a preensão e manipulação autónomas de objetos com formas irregulares, especialmente em espaços compactos e ambientes não estruturados.
Recentemente, inspirando-se nas artes de corte de papel do kirigami, os engenheiros conseguiram adaptar espacialmente a rigidez de folhas finas usando cortes. Diferente da mudança de forma de uma folha de origami, que é governada principalmente pela geometria do padrão de dobramento, a mudança de forma de uma folha de kirigami é governada pela geometria do padrão, topologia e cargas externas que induzem estiramento, flexão e torção.
Apesar das várias tesselações de kirigami possíveis, cortes lineares paralelos são frequentemente usados para criar materiais arquitetados e dispositivos mecânicos e elétricos em vários comprimentos e escalas devido à sua simplicidade e comportamentos matematicamente previsíveis.
A geometria deste padrão é caracterizada pelo comprimento (ℓc) e largura (tc) de uma única fenda e pelo espaçamento longitudinal (ℓy) e transversal (ℓx) entre fendas adjacentes (Fig. 1 e Filme 1). Ao controlar estes parâmetros geométricos no mosaico, configurações deformadas no estiramento uniaxial podem ser programadas a priori.
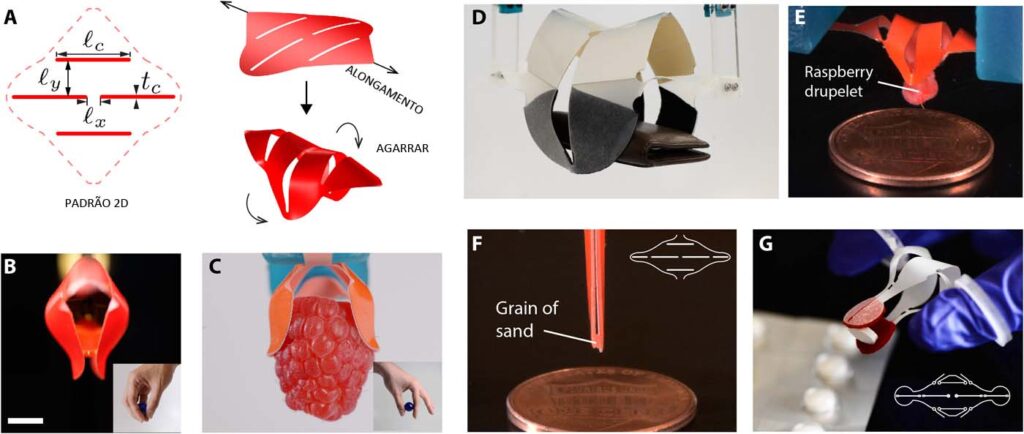
(A) Geometria 2D da concha do kirigami e sua morfologia após alongamento. Realizando preensão polegar-indicador: segurando/enjaulando uma esfera de hidrogel (B) e beliscando uma framboesa (C). Pinças escaláveis: uma pinça do tamanho de uma mão apertando uma carteira (D) e uma pinça do tamanho de uma moeda apertando uma drupeleta de framboesa (E). (F) Garra com apêndices estendidos segurando um grão de areia. (G) Ferramenta manual portátil que segura comprimidos médicos usando apêndices modificados. Barra de escala, 10 mm.
A versatilidade das pinças de kirigami permite coletar uma ampla variedade de objetos, incluindo algo tão delicado como uma framboesa. Eles podem ser aumentados para capturar objetos grandes e reduzidos para capturar um grão de areia individual.
Conectar células unitárias de pinças de kirigami em série e/ou em paralelo permite que elas agarrem objetos delgados e manipulem vários objetos simultaneamente. Essas estruturas podem ser feitas de diversos materiais e demonstramos como acionar as garras usando um campo magnético.
Neste trabalho, apresentamos uma estratégia de design simples para pinças macias possibilitadas pela deformação previsível de conchas de kirigami que são capazes de agarrar objetos delicados de forma rápida e precisa e podem ser miniaturizadas, serializadas e desamarradas.
Usando experimentos, simulações de elementos finitos e modelagem teórica, mostramos que esta pinça é escalável e independente de material e pode ser acionada simplesmente esticando a casca do kirigami.
Descobrimos que uma concha com formato de flor de quatro pétalas, composta por quatro fendas dispostas, é a forma mais fundamental de concha de kirigami que pode transferir uma atuação linear uniaxial para um movimento de preensão mais complicado (Fig. 1A).
Quando a casca do kirigami está totalmente fechada, ela forma uma cápsula, dando origem a duas posturas de preensão, beliscando com apêndices ou envolvendo com a cápsula. O envelope, que fornece muitos pontos de contato entre a pinça e os objetos, é um esquema de preensão muito eficaz para proteger objetos, especialmente para capturar objetos escorregadios e delicados.
É um estudo longo e muito interessante, veja a íntegra da matéria no link abaixo: